The bipedal structure has supreme characteristics in obstacle avoidance and compatibility in works as human substitutes. However, the dynamics involved is highly non-linear, complex and unstable. Many methods ranging from off-line trajectory generation to feedback systems based on multi-sensor-fusion are employed in the control of biped walking robots. The design of a biped robot is a process of satisfying many conflicting specifications. The aim of the research is to develop techniques and procedures in the design and control of biped robots [2], simulate designed control algorithms and finally apply them in the realization of a full body biped robot. The work can be divided into a variety of tasks, which include, but are not limited to the following:
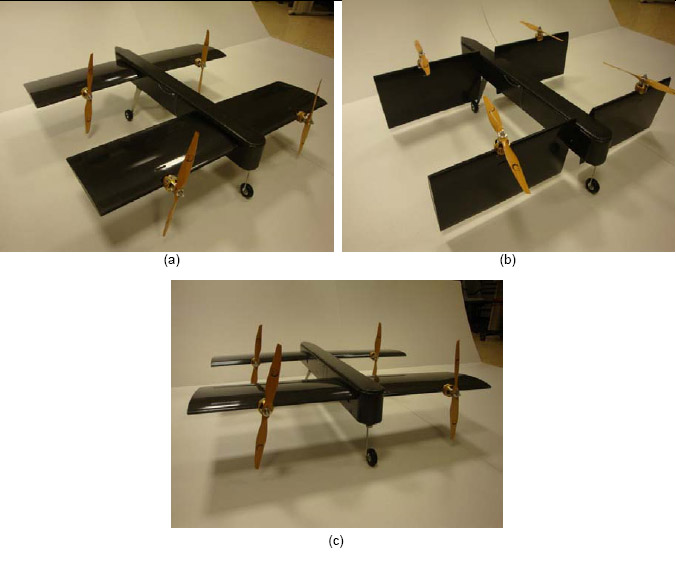
Design, Prototyping and Flight Control of Unmanned Aerial Vehicles
Our research on unmanned aerial vehicles (UAV) focuses on mechanical and aerodynamic design, prototyping and flight control of various rotary wing, fixed wing and hybrid aerial vehicles. In a TUBITAK funded project, a novel quad tilt-wing UAV was designed and constructed. The aerial vehicle can both take-off and land in the vertical direction like a helicopter and fly fast and efficiently in the horizontal direction like an airplane. It is able to hover at a constant point in air; hence, it can carry out effective surveillance even indoors at very low speeds. On the other hand, it has the ability to carry out fast, economic, long distance and long duration horizontal flights with the help of the lift forces of its wings. The aerial vehicle mechanically consists of a body built on four wings and four electric motors, which can switch between horizontal and vertical planes together with the wings, mounted at the tips of the wings. The switching of the motors from horizontal to vertical planes are achieved by servos, and different power and angular configurations of the motors and servos are used for vertical take-off and landing as well as for maneuvers during horizontal flight. A hierarchical control system was designed for this vehicle. The high-level control system orchestrates the switching between low-level controllers based on different operating modes of the vehicle. The control system of the vehicle runs on a micro-controller and the angles around all three axes are estimated by an extended Kalman filter using IMU data. The vehicle has wireless cameras for surveillance.
Current research activities in this area includes development of a smart autopilot that utilizes both robust and adaptive controllers in the flight control of various unmanned aerial vehicles (UAV) to provide stability despite the adverse weather conditions such as wind and rain, maintain the desired route, and avoid possible collisions with obstacles using visual and non-visual sensors. Vision based automatic takeoff and landing are also under investigation.
Inspired by swimming micro organisms, swimming micro/nano robots (SM/NR) hold great potential in medical applications and microfluidics research. Applications are many: targeted drug delivery, minimally invasive surgery, gene therapy, diagnosis, and as manipulative agents in microsystems such as lab-on-a-chip devices. Our research aims to develop controllable navigation of SM/NR with helical tails in confinements. We design and manufacture millimeter-scale robots with the 3D printing technology. The swimmers are propelled by rotating magnetic fields inside channels filled with viscous fluids to ensure physical similarity with the micro swimming conditions from fluid mechanics point of view. Experiments are conducted to obtain the positions, trajectories, velocities and orientations of the swimmer. In addition to experimental studies, Computational Fluid Dynamics (CFD) models are developed to study the flow field around the swimmer, and for simulation experiments.
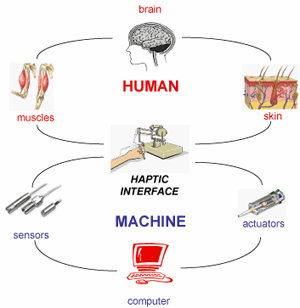
Human Machine Interaction (HMI) Laboratory focuses on the design, control, implementation, and evaluation of mechatronic systems that are capable of haptic interaction — physical interaction with the user through the sense of touch. In particular, we develop and analyze principles and tools to enable physical human-robot interaction (pHRI) with a systems and controls perspective. We aim to achieve optimal performance for such systems, while simultaneously ensuring safety and ergonomic nature of interaction under the coupled dynamics of the human-robot system and the constraints imposed by human biomechanics/sensorimotor control. Our research extends to synthesizing algorithms for simulated physical interaction with virtual environments (haptic rendering) and exploring the control theoretical framework of human sensorimotor system through empirical investigations of skill acquisition.
Applications of our research include robotic devices for physical rehabilitation, active exoskeletons and prostheses for human augmentation, force-feedback devices for robot-assisted surgery, haptic interfaces for manual skill training, teleoperators for exploration of hazardous or remote environments, x-by-wire systems for automotive/aerospace industry, and service robots for collaborative task execution with humans. Our research contributes to the fields of robotics, system and controls, multi-body dynamics, mechanical design, biomechanics, physical medicine, and basic science.
Force-Feedback Exoskeletons and Rehabilitation Robotics
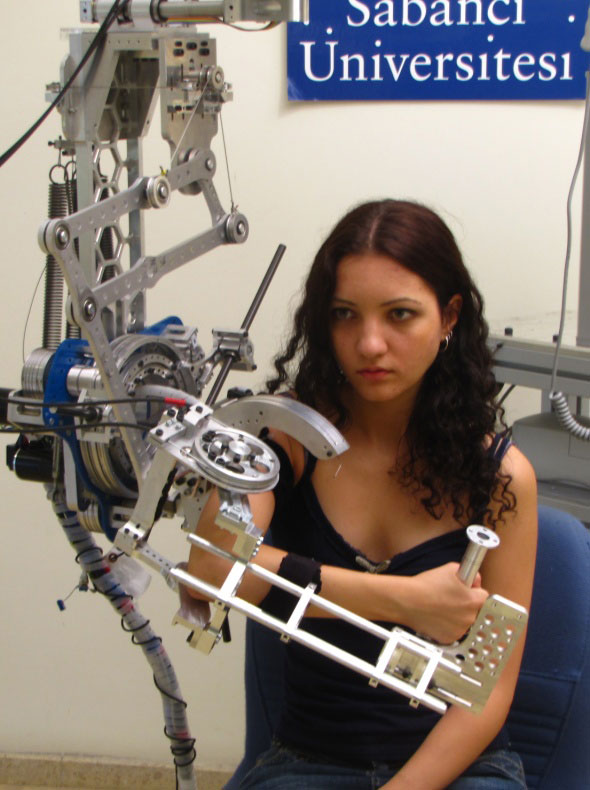
AssistOn-Arm – Self-aligning arm exoskeleton
Neurological injuries are the leading cause of serious, long-term disability in developed countries. Physical rehabilitation therapy is indispensable for treating neurological disabilities. Therapies are more effective when they are task specific, intense, repetitive, and allow for active involvement of patients. Robotic devices in repetitive and physically involved rehabilitation eliminate the physical burden of movement therapy for the therapists, enable safe and versatile training with increased intensity, allow quantitative measurements of patient progress, increase the reliability, accuracy, and effectiveness of traditional physical rehabilitation therapies, and realize innovative treatment protocols.
We have expertise on the design, human-in-the-loop control, implementation, and evaluation of a range of novel powered exoskeletons for robot-assisted rehabilitation targeting the movements of the shoulder, elbow, wrist, hand, finger, pelvis, hip, knee, ankle, and foot. The self-aligning exoskeletons automatically adjust their joint axes to ensure an ideal match between human joint axes and the device axes, not only guaranteeing ergonomy and comfort throughout the therapy, but also extending the usable range of motion for the targeted joints. Moreover, their adjustability feature significantly shortens the setup time required to attach patients to the exoskeletons. These exoskeletons are equipped with safe adaptive controllers that emphasize coordination and synchronization between various degrees of freedom, while leaving exact timing on the desired path to the patient. The controllers provide assistance “as-needed” to enable patient to complete the task, while maximally engaging the patient. Furthermore, the controllers enable delivery of “repetitive tasks without repeating the same task”, while guaranteeing coupled stability of the human-robot system.
Medical Robotics
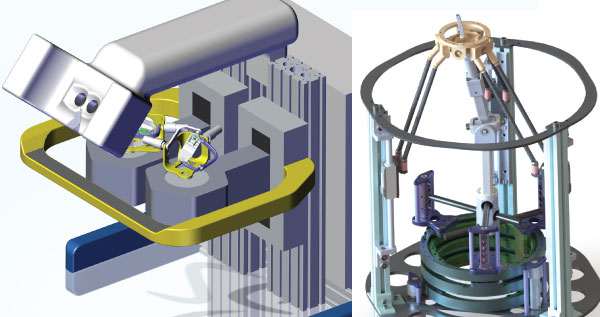
Laparoscopic surgical robot and its bimanual control interface
Laparoscopy, a commonly used minimally invasive surgical procedure, utilizes slender surgical tools and cameras inserted into the abdomen of a patient through small ports on the skin, enabling the surgeon to perform numerous procedures without large incisions. In comparison with traditional open surgical procedures, laparoscopy offers reductions in trauma, post-operative pain, recovery time, and scarring and blood loss for the patient and is more cost effective due to the reduced risk of complications, shorter hospital stays and less medication requirements. Despite the numerous advantages laparoscopy presents for patients, it is quite difficult to master for surgeons. During laparoscopy, the surgeon’s hand motions are reflected about the incision point, known as the fulcrum effect, access to the patient’s body is restricted, and only 2D visual feedback is available resulting in a loss of vital depth perception. Due to the difficulty in mastering laparoscopy, surgical training is indispensable and effective training approaches are crucial.
Virtual reality (VR) simulation, where a trainee virtually interacts with human tissue, is a viable alternative to the conventional laparoscopic surgical training, bridging the gap between the learning process and actually carrying out the real time surgery. VR simulation not only reduces the training costs and number of animal/cadaver experiments, but also makes it possible for the surgical tasks to be repeated as much as required. The incorporation of force feedback into VR simulation enhances the surgeon’s perception of pulling and grasping maneuvers, such that surgeons can grasp tissues with less force and without causing scars. Consequently, this improves the trainee’s overall performance. We specialize on the design, control, implementation, and evaluation of force-feedback laparoscopic training devices and bi-manual haptic interfaces for bilateral teleoperation of such surgical robotic devices.
Robotic Prostheses
Variable stiffness transradial hand prosthesis
Versatile grasping and manipulation in unstructured environments are challenging tasks. Anthropomorphism (ability to emulate human-like hand shape, size, and consistency) and dexterity (successful manipulation capability even under unstructured conditions) are commonly identified as the key features to reach a satisfactory level of performance. Successful manipulation necessitates another significant and commonly neglected characteristics of human hand, namely the impedance modulation. Incorporating impedance modulation property in the design of a hand prosthesis makes it adaptable to interacted objects/tasks. Successful execution of many activities of daily living, where human physically interacts with the environment, arises from proper modulation of the impedance level of hand based on the varying requirements of the task.
We have experience on the design, natural user interface, control, implementation, and evaluation of a low-cost, customizable, easy-to-use hand prosthesis capable of adapting its stiffness. Control of the variable stiffness hand prosthesis is achieved by a surface electromyography based natural human-machine interface, called tele-impedance control. This interface, together with variable stiffness actuation, enables an amputee to modulate the impedance of the prosthetic limb to properly match the requirements of a task, while performing activities of daily living.
Cognitive Robotics
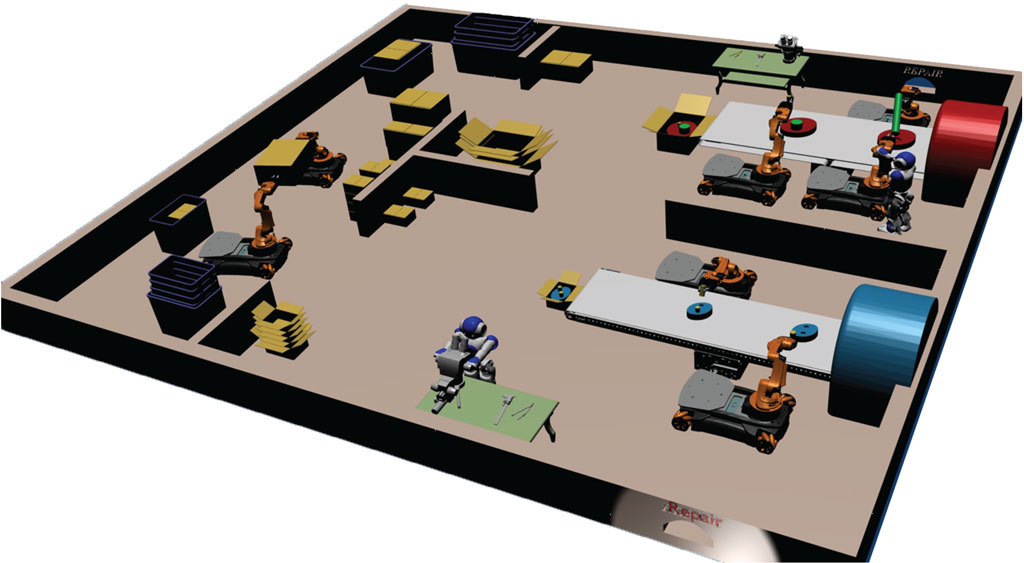
Cognitive factories
Cognitive Robotics (CogRobo) is concerned with endowing robotic or software agents with higher level cognitive functions that involve reasoning, for example, about goals, perception, actions, the mental states of other agents, collaborative task execution. Our research has mainly been on bridging the gap between high-level reasoning and low-level control, involving both theoretical and hands-on components.
Due the interdisciplinary and synergistic nature of this research area, we study various topics, including kinematic and dynamic modeling of robots, architectures for robot control, world maps and localization, object recognition, manipulation and path planning, human-robot interaction, AI planning, sensing and monitoring, diagnosis, learning, representation and reasoning formalisms and algorithms, and methods for coupling high-level reasoning with low-level feasibility checks. We apply our methods in different robotic application domains, such as robotic manipulation, cognitive factories, service robotics, cognitive rehabilitation robotics, computer games, cloud robotics.
CogRobo Group has emerged from collaborations between Knowledge Representation and Reasoning Group and Human-Machine Interaction Laboratory.
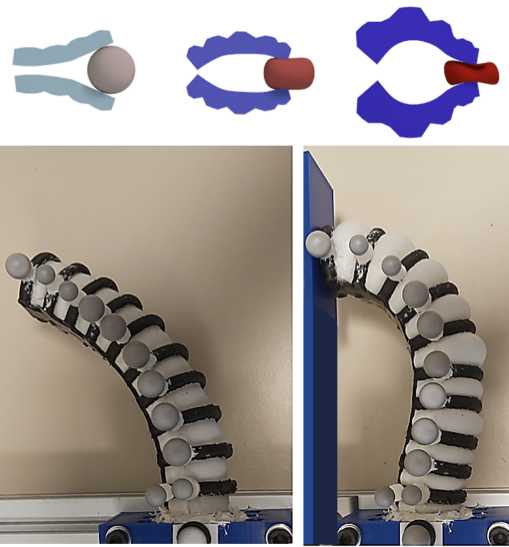
The area of soft robotics concerns the design, fabrication and control of mechanically flexible robotic systems, which are usually composed of compliant materials. Robots with mechanical flexibility could be exploited for several benefits such as safe human-machine interactions, or adaptability to external environment. However, driving such systems with precision poses a significant challenge due to the complexity of their dynamics.
Soft Robotics and Control Lab focuses on the design, development, modelling and control of novel soft robots for physical human-robot interaction, such as assistive systems for rehabilitation, haptic interfaces, or surgical robots. The topics we study include model-based control of soft robots, fabrication of soft actuators/sensors, sensor fusion and design of human-machine interfaces.