
|
Multi-Disciplinary Design Optimization (MDO) of Complex Mechatronic Systems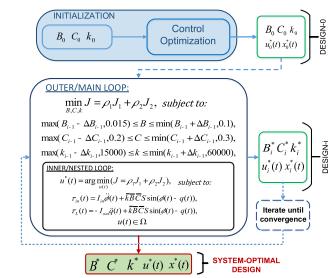 Figure Co-design framework for variable stiffness actuators developed in collaboration with Dr. Patoglu
Figure Co-design framework for variable stiffness actuators developed in collaboration with Dr. Patoglu
Development of multi-disciplinary design optimization platforms has become crucial to satisfy stringent performance expectations for many complex systems such as aircrafts, automotive and similar. Being multidisciplinary systems, performance of such devices cannot be fully exploited unless MDO techniques that account for their inherent design couplings are employed for their optimization. Design of best performing engineering systems necessitates a good understanding and optimal utilization of interactions among their disciplinary design components. These interactions, also known as design couplings, have been defined as the design interrelationships among engineering disciplines within a multidisciplinary system. Robotic systems similar to many mechatronic systems are examples of controlled mechanical systems that require both the design of a mechanism—often referred to as a “plant” and a controller. In collaboration with Dr. Patoglu, Dr. Kiziltas focuses on the development of co-design frameworks to robotic systems such as a VSA in an effort to move towards systems having otherwise unattainable levels of performance. Automated Design and Fabrication of Material Based Complex SystemsDr. Kiziltas’ research addresses the challenges of system design from an interdisciplinary engineering perspective, with a focus on using automated design tools (such as topology optimization) and artificially engineered composite materials. The development of artificial materials with new features has been a key to the spectacular technological advances of the last decades. In particular, in addition to the analysis and synthesis of materials with special electric and magnetic properties, their fabrication and characterization are topics of high strategic relevance, in view of their potential impact on a variety of leading edge technologies, including not only telecommunications but also aerospace, RF-MEMS, biomedical engineering and the science of materials. Advances in the research topics of Dr. Kiziltas group will allow, for the first time, integration of the best simulation tools and design algorithms to generate totally novel and yet unthinkable designs that will lead to a new paradigm in design. This goal being the essence of her research group, the outcome of these investigations will have tremendous impact on not only microwave devices such as multifunctional novel antennas but also on energy and biomedical applications. |
|
|

|
|
- Education
- Research
- Research Areas
- Advanced Mechanics of Composite Structures
- Automotive Systems
- Biomechatronics
- Biomedical Applications
- Design of Mechatronic Systems
- Dynamics and Vibration
- Energy Systems
- Experimental and Computational Micro/Nano Fluidics and Heat Transfer
- Real-Time Imaging and Machine Vision Systems
- Robotics, Systems and Controls
- Shape Sensing and Structural Health Monitoring
- Tissue Engineering
- Topology Optimization of Materials and Structures
- Labs & Research Groups
- Publications
- Projects
- Research Videos
- Research Areas
- People
- Information
- Contact
-